VOIR – DIAGNOSTIQUER – TRAITER
Bénéficiez d’un ensemble complet d’applications avancées proposées par Canon, conçues pour aider à améliorer l’efficacité du diagnostic et l’issue du traitement.
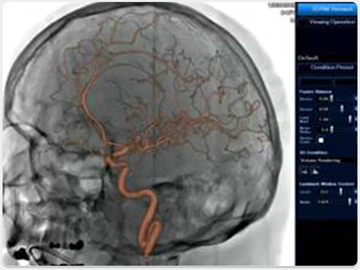
L’imagerie 3D à grande vitesse vous donne des informations 3D en quelques secondes, permettant une planification plus rapide de la procédure et un guidage en temps réel.

3D-DA: Acquisition rotationnelle rapide non soustraite.
3D-DA: Acquisition rotationnelle rapide non soustraite.

3D-DSA: Acquisition rotationnelle rapide soustraite.

3D – Bone&Device Fusion
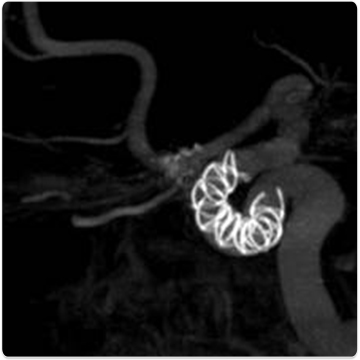
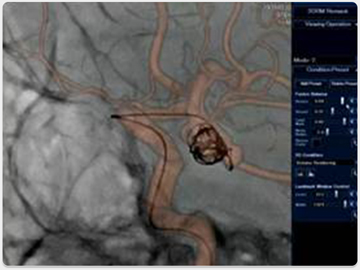
Imagerie d’endoprothèses: technique spéciale haute résolution pour la visualisation de structures plus fines.
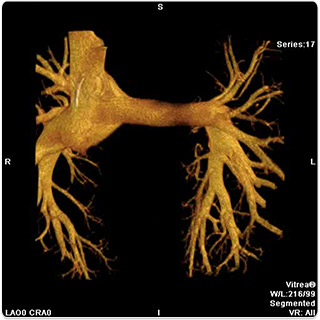
Cone Beam CT: Acquisition rotationnelle type « scanner » / LCI : Low Contrast Imaging.
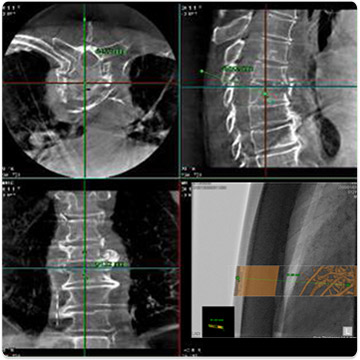
NAVIGATION ET GUIDAGE DANS LES VOLUMES
Comme les procédures interventionnelles sont de plus en plus complexes, des outils de navigation et de guidage appropriés sont nécessaires pour aider au mieux l’utilisateur lors de la phase de déploiement de dispositifs ou d’aiguilles. La navigation dans les volumes permet la cartographie en temps réel sur la fluoroscopie directe d’un ensemble de données 3D préparé provenant de l’angiographie 3D, du scanner ou de l’IRM afin de fournir à l’utilisateur des informations 3D supplémentaires sur l’architecture vasculaire ou sur l’anatomie environnante pendant la fluoroscopie.
SYNCHRONISATION AUTOMATISÉE:
- Toute rotation/angulation de l’arceau
- Taille de champ de vision
- Mouvements verticaux de la table
- Manœuvre synchronisée du plateau de table
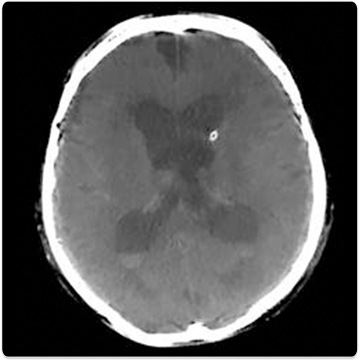
FUSION MULTIMODALITES
Utilisez un volume 3D provenant de l’angiographie rotationnelle 3D, du scanner ou de l’IRM en le fusionnant avec la fluoroscopie en temps réel.